Projects Archive

2023
Pietro Micca Museum - Rover tunnels exploration and mapping
Object: testing of the functionality of a Rover Jackal UGV Clearpath within the tunnels of Pietro Micca Museum. The objective of this project is to map paths inside the tunnels, and at the same time test the technologies necessary for the autonomous navigation of the rover in particularly complex conditions. The rover is equipped with depth tracking cameras and lights that help visibility inside the dark tunnels.

2023
INDOOR - Using Drones for Organ Transportation
Object: this project is made in collaboration with the DOT Foundation (Donation and Organ Transplants) for the transport of transplant organs and biological materials through UAV systems. The first experimental drone flight will carry inert substances that simulate biological samples, kept inside a capsule designed for this purpose. The use of drones in this field could bring a profound change in the national health system, with a significant reduction in costs and greater safety in the completion of organ transport and transplant operations.
2022
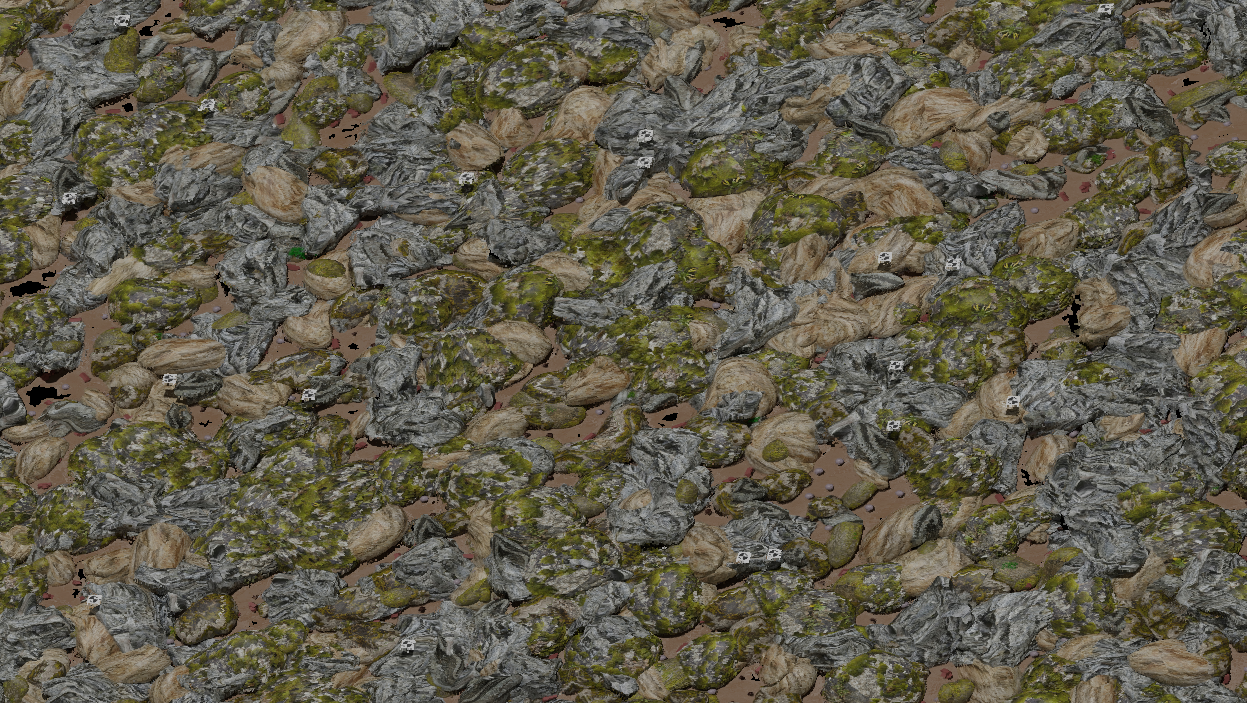
Rock face photogrammetry
Object: test open-source photogrammetry programs and evaluate their accuracy in processing images of a rock face taken by a drone, using simulated data.

2022
WPFORMAT
Object: the presented study experiments a deep learning algorithm, to recognize automatically unmanned ground vehicles (UGVs) in video
streams taken by unmanned aerial vehicles (UAVs). The final aim is to enhance the functionalities of our existing traffic monitoring solution that will be then able to recognize in real time different kind of vehicles driving in the roads (cars, motorbikes, buses, lorries…).

2021
Edison Robotics and applications
Object: In the main frame of the smart home environment, the aim of the project is to explore assistive solutions for comfort and wellbeing.
Starting from the investigation of the already developed solutions in the service robotics field, the researchers are focusing the attention on an effective and innovative platform to answer to the real necessities of families.

2021
MArcEL - Electric Agriculturing Machines
Object: the project has the ambition to present a completely new way of designing agricultural machines, introducing all the advantages of the drives by adopting electric motors instead of the current systems involving mechanical/hydraulic actuations: simplicity of design, precision in operations, wealth of information to support the action. It intends to provide an important contribution from the technological point of view, of efficiency in consumption, economic saving, improvement of safety and reduction of the environmental impact within the Agricultural sector, one of the pillars of the national economy, insisting on whole supply chain.
2019
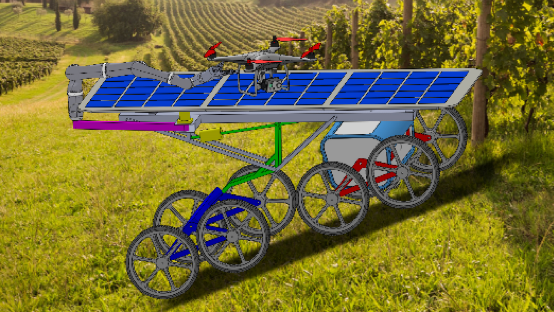
Agri-Q
Object: design of a mobile platform operating in vineyards for Mapping, Monitoring and Manipulating operations. The platform consists of four subsystems:
- Rover
- Robotic Arm
- Sensors control and communication
- Power supply (Photovoltaic, batteries, power supply)

2019
TRoHAS (Technologies for Robotic Home Assistance Services) - Development of technologies enabling home assistance services
Object: the project will be based on four technical WPs (robotic platform, machine learning algorithms, user interfaces and system integration). The project will concentrate on the development of technologies that will be tested on a demonstrator in the final pilots.

2019
Prin next generetation ultra-wide band
Object: this project, coordinated by the University of Trento, involves the University of Milan, the University of Brescia and Politecnico di Torino. The goal is to develop new technical solutions and innovative applications to exploit the full potential of UWB technology. As PIC4SeR we are designing a mobile localization infrastructure to improve localization in partially GPS-denied environments. Our idea is to use a swarm of 4 (or more) drones equipped with UWB devices as a “local GNSS-like constellation” that allow high precision localization in harsh environments (e.g. urban canyons, orchards, mountains, …).

2019
SEI - Spectral Evidence of Ice (MANUNET)
Object: the SEI project will experiment spectral sensor fusion techniques of data acquired by UAVs during aircraft preflight inspection. In General Aviation, an important safety issue regards the presence of ice on the aircraft’s fuselage and wings. Ice on the wings can cause loss of lift and stalling, which in most cases would result, during takeoff phase, in airplane’s fatal crash. Another important aspect that the project aims to reduce is the high amount of deicing liquid usually involved in the process incurring in high costs and considerable damage to the environment.

2018
G7 - African innovation leaders
Object: modern agriculture for increased productivity and production is one of the goals derived from the first aspiration of the Africa Agenda 2063 framework. Precision Agriculture offers and encourage many opportunities for cross-sector growth specially in the service industry (sensors, IOT, ICT & machines) and food companies (processing, logistics & retail).

2017
Agrifood Polo - vitifuture
Object: the project is part of the context of Precision and Decision agriculture, draws on the experience of feasibility studies and previous collaborations between the partners involved in this project. In particular, it will concern the construction of an integrated ground-air system aimed at supplying a product/service for wineries suitable for the management of hilly vineyards. This type of vineyard has been chosen because its complexity and the richness of peculiarities make it a context in which a multidisciplinary approach is essential. Moreover, in these environments the cultivation management presents difficulties that could be solved with the contribution of precision farming tools.

2017
Study and experimentation of systems, instruments and innovative methodologies for the survey and inspection of instractures in complex environments (IREN)
The object of the project is the use of unmanned systems for:
- metric and radiometric inspection of reservoirs, tunnels, pipelines and other infrastructures;
- surface and submarine infrastructures video inspection, including metrology of submerged infrastructures;
- study and experimentation of environmental parameters (temperature, pressure, pollutants, methane, etc.) in open environments for automatic knitted acquisitions.

2017
Acquisition of high-resolution spatial data in a complex environment by integrating innovative methods/ techniques and multi-scale approach (Unione del Lago Maggiore)
Object: The aim of the project is to study rocky walls subject to instability with a multidisciplinary, multiresolution and multiscale methodology. Walls are investigated with a geomatic and a geomechanical approach with the help of the data acquired by UAVs. The data are useful to study protection actions to contain the possible walls severance.